



How Android Head Units Connect to CAN-Bus Without Car Errors

Learn how SMARTY Trend Android head units safely integrate into a vehicle's CAN-Bus network. Discover how professional engineering ensures correct MCU synchronization, keeps the factory system completely free of DTC error codes, and prevents parasitic battery drain in deep sleep mode.
CAN-Bus Protocol Integration: How Android Head Units Communicate with Factory Automotive Networks Without Dropping Error Codes
Modern vehicles are no longer just mechanical machines with wires; they are mobile local area networks (LAN) governed by complex computing architectures. When upgrading a factory infotainment system to an advanced Android Head Unit, the primary concern for car enthusiasts and engineers alike isn’t just screen size or processing speed. It is network integrity.
How does an aftermarket head unit integrate seamlessly into a vehicle’s proprietary ecosystem without triggering Diagnostic Trouble Codes (DTCs), disrupting the comfort network, or-worst of all-causing parasitic battery drain?
This technical deep-dive breaks down the engineering behind SMARTY Trend CAN-Bus protocol integration, illustrating how we bridge the gap between open-source Android systems and closed factory automotive networks.
1. What is CAN-Bus and Why Does Aftermarket Infotainment Need It?
What is a CAN-Bus adapter in a car head unit? A CAN-Bus (Controller Area Network) adapter is a hardware gateway running specialized firmware that translates a car's high-speed, proprietary vehicle network messages (HEX codes) into standard Android-readable API commands, and vice versa. It allows aftermarket head units to control factory climate systems, retain steering wheel controls, and display optical parking systems without causing ECU communication errors.
+------------------------+ +---------------------+ +---------------------------+
| Vehicle CAN High/Low | ---> | SMARTY Trend MCU | ---> | Android OS (HAL/API) |
| (Proprietary HEX) | <--- | & Decoder Gateway | <--- | (User Interface & Apps) |
+------------------------+ +---------------------+ +---------------------------+
In a typical vehicle, ECUs (Electronic Control Units) constantly broadcast messages over a twisted pair of wires known as CAN-High and CAN-Low. These messages dictate everything from engine RPM and door status to steering angle matrixes and climate control steps.
When you remove a factory radio, you aren't just removing an audio display; you are removing a vital node on that network. If the network suddenly experiences a missing node, the Central Gateway (CGW) or Body Control Module (BCM) triggers communication errors (e.g., U-series OBD-II codes like U0184 - Lost Communication With Radio).
2. The Mechanics of Translation: Hardware Decoding vs. Software Execution
To prevent network conflicts, SMARTY Trend utilizes a dual-layer integration topology: a dedicated external Hardware CAN Decoder Module paired with a highly optimized internal MCU (Microcontroller Unit) chip on the head unit’s mainboard.
| Feature / Metric | Standard Aftermarket Adapters | SMARTY Trend Integrated Architecture |
| Data Processing Layer | Software Emulation (High Latency) | Hardware-level Real-time Decoding |
| Bus Compatibility | Single CAN Line only | Multi-CAN (High-Speed & Comfort CAN-Low) |
| Error Code Mitigation | Passive (Ignores network queries) | Active Acknowledgment (Simulates OEM Node Presence) |
| Quiescent Current Draw | 45mA – 80mA (Risk of battery drain) | < 3mA to 5mA (Deep Sleep State) |
| CAN Refresh Rate | 20Hz – 50Hz (Laggy steering controls) | Up to 100Hz (Instantaneous response) |
Active Node Simulation: Eliminating the "Guards" of the Network
When the vehicle scans its network via OBD-II diagnostics, the SMARTY Trend system actively responds with the correct cryptographic handshake and identifiers required by the vehicle's specific make and model (e.g., BMW’s K-CAN, Mercedes' CAN-B, or VAG’s CAN-Infotainment). By acting as a perfect digital twin of the factory radio, the car's central gateway records zero network anomalies, keeping the dashboard completely free of "Check Engine" or accessory warning lights.
3. Retaining Complex OEM Features: Climate, Parking, and Dynamics
One of the biggest anxieties buyers face is losing deeply integrated vehicle settings. Our CAN-Bus integration decodes raw hexagonal telemetry data packets in real time, translating them into fluid, high-resolution UI overlays within milliseconds.
Steering Wheel Controls (SWC) via Resistor vs. Digital Bus
Unlike older cars that used analog resistance (Key 1/Key 2 wires) to detect button presses, modern premium vehicles route steering commands through digital CAN packets. The SMARTY Trend gateway reads these specific packet headers. When you press "Volume Up," the packet is instantly converted into an Android system volume command without affecting other modules on the same bus line.

Optical Parking Systems (OPS) & Dynamic Trajectory
When reverse gear is engaged, the head unit doesn't just switch to a camera feed. The CAN decoder reads the vehicle's Steering Angle Sensor (SAS) data packets directly from the chassis bus. It applies trigonometric algorithms to calculate the exact path of the car, projecting dynamic, sweeping steering lines over the video feed while simultaneously rendering radar parking sensors on a split screen.
[SAS Module] ---> (CAN-High/Low) ---> [Decoder Module] ---> [Android HAL] ---> [Dynamic Guidelines Rendered Over Video]
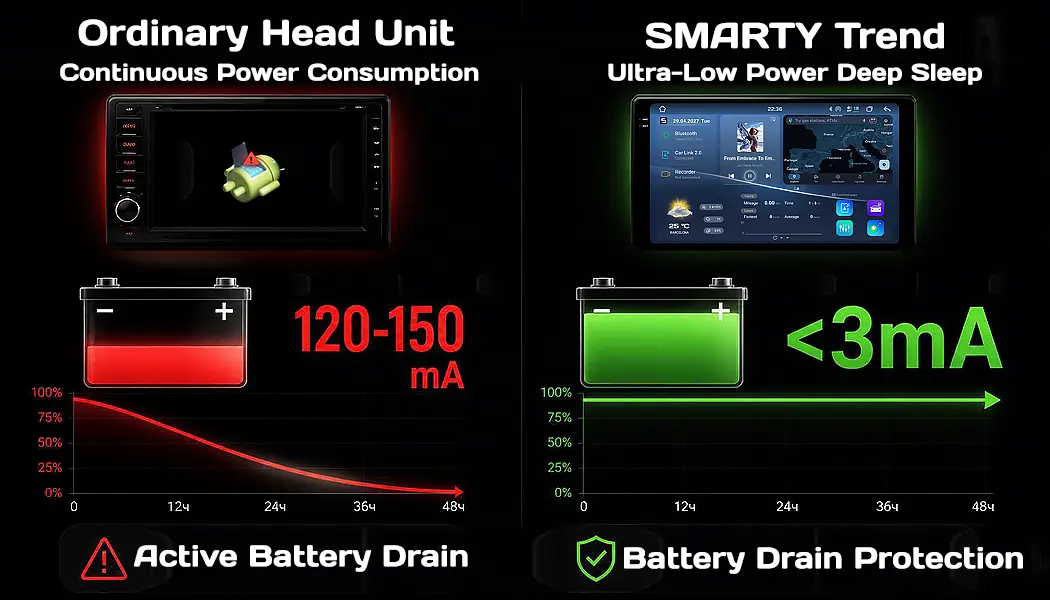
4. The Sleep Cycle Solution: Solving Parasitic Battery Drain in 2026
The most severe technical issue with poorly engineered aftermarket head units is the infamous parasitic battery drain. If a head unit or its CAN decoder fails to enter a true low-power state, it can drain a healthy car battery overnight.
Why Does Parasitic Drain Happen?
Vehicles use a command known as the Network Sleep Message. When the ignition is turned off and the doors are locked, the BCM sends a command telling all ECUs to go to sleep. If an aftermarket decoder continues to broadcast data packets or "noise" on the CAN-Bus, it accidentally keeps the entire car's network awake. The vehicle's main computers remain in an active state, pulling anywhere from 2A to 5A of current.
[Vehicle Ignition Turned Off & Locked]
|
[BCM Broadcasts: "Go To Sleep"]
|
+---------------+---------------+
| |
[Low-End CAN Adapter] [SMARTY Trend Architecture]
- Keeps broadcasting data - Instantly cuts TX/RX lines
- Vehicle ECUs stay awake - Drops current to < 5mA
- Battery drains overnight - Deep Sleep Mode active
| |
(CRITICAL ERROR) (SAFE & PROVEN)
The SMARTY Trend Zero-Drain Protocol
Our hardware modules utilize intelligent Automatic Bus State Detection (ABSD).
-
The Handshake Close: As soon as the vehicle's accessory line (ACC) drops, our MCU terminates all active transmission (
TX) and reception (RX) lines to the vehicle's CAN bus. -
Deep Sleep State: The head unit drops into an ultra-low-power standby mode, while the CAN decoder drops its power consumption to less than 5mA.
-
No Phantom Wakeups: Because our modules remain completely silent after the vehicle locks, the BCM safely shuts down all auxiliary relays, protecting your vehicle's battery longevity even during weeks of non-use.
5. FAQ: Everything You Need to Know About Android Integration
Q1: Will installing an Android head unit void my vehicle's manufacturer warranty?
Answer: No. Legally, under regulations like the Magnuson-Moss Warranty Act (and equivalent European consumer laws), a manufacturer cannot void a vehicle warranty simply due to an aftermarket installation unless they can prove the aftermarket part directly caused a failure. Because SMARTY Trend units connect via plug-and-play harnesses with isolated CAN decoders, they do not alter or splice into original factory wiring, preserving vehicle warranty compliance.
Q2: Why do some aftermarket screens cause airbag or ABS warnings on the dash?
Answer: This occurs when a low-quality CAN adapter broadcasts conflicting Node IDs on the network, causing a collision of data packets. When a critical safety system like the ABS or SRS (Airbag) module experiences interrupted data transmission due to this packet collision, it triggers a safety fault. SMARTY Trend's firmware utilizes strictly isolated, read-only parameters for safety-critical IDs, ensuring zero interference with braking, deployment, or safety networks.
Q3: What's the difference between standard CAN modules from Hiworld and Raise and the customized modules for SMARTY Trend?
Answer: While brands like Hiworld and Raise manufacture generic hardware, the magic lies in the firmware configuration. SMARTY Trend uses custom-engineered MCU profiles that match the specific region, trim level, and component variation of your car. This guarantees smoother UI integration, higher screen refresh rates for climate menus, and more accurate parsing of vehicle data fields than generic off-the-shelf alternatives.
Conclusion: Engineering Peace of Mind
Upgrading your vehicle's dashboard with an Android Head Unit should never mean sacrificing its structural digital integrity. By choosing an advanced hardware gateway architecture with active node simulation and precise automatic sleep protocols, SMARTY Trend delivers a true OEM-level integration experience. Your factory features remain intact, your electrical system remains safe, and your vehicle diagnostics stay entirely error-free.

Best Android Head Unit for Mercedes: The Ultimate Multimedia &...

Digital Instrument Clusters by SMARTY Trend: The Ultimate Virtual...

How to Connect and Configure Steering Wheel Buttons on a SMARTY...

The Evolution of Comfort: How to Choose a Premium Android System...

Android Head Unit vs. Factory Radio: Is It Worth Upgrading in 2026?